| |
|
| 灵活的编程工具 |
|
| Baldor的Mint语言为机器设计者提供了极大的灵活性, |
|
|
以满足不同性能和操作要求。 |
|
| |
|
| MintMT |
 |
| MintMT的特点包括: |
|
●
过程和函数可进行参数传递并可定义局部变量 |
|
●
指定变量和数组 |
|
●
独立任务数仅受可用内存限制 |
|
●
编译源代码用于高速执行程序 |
| |
| |
| |
| |
| MintMT提供灵活的类似Basic语言风格的自动化编程架构,开发和测试几分钟就可进行。可以通过 |
|
关键字直接调用运动过程,从简单的轨迹到复杂运动,比如软件凸轮和飞剪。同时,还覆盖了I/O和 |
| HMI功能,Mint提供了自动化的完全解决方案,并且可自动独立执行。 |
| |
|
|
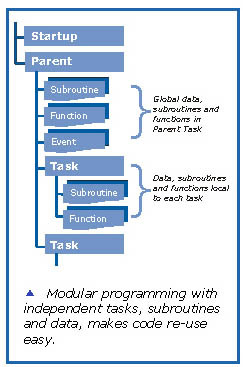
多任务进一步简化了开发,使得复杂的要求,比如机器控制可以分解为可管理的多个小任务,诸如 |
| 运动、人机界面及I/O处理。 |
| |
|
| 运动方式――位置运动 |
|
| |
|
| 绝对和相对:有其自身的速度、加速度和减速度定义(包括梯形和S形方式) |
| |
|
| 插补运动:运用100个运动缓冲区域,可以混合多项线性和圆弧运动,完成连续的复杂运动轨迹。 |
| 每项运动可以设置其自己的进给速率。 |
|
| |
|
| 螺旋插补:对于3轴,可以进行空间3维螺旋插补。 |
|
| |
|
| 速度控制:Jogging功能允许电机在位置控制下以一个预置的速度连续不停运转。 |
| |
|
| 样条逼近:允许一连串的运动,按照位置、速度和时间混合成连续的平滑运动。 |
| |
|
| 运动方式――主从跟随 |
|
| |
|
| 电子齿轮&离合器:允许两个或更多个轴通过一个可编程的比例关系而连接起来。所有轴除了脉冲 |
|
计数器输入外,还可以和其他任何轴形成齿轮关系。离合功能允许在同步时控制精确的起停距离。 |
| |
|
| 在线叠加:当处于齿轮关系时,可以进行增量运动,从而对位置进行修正。 |
| |
|
| 电子凸轮:用伺服/向量电机及软件可编程轨迹(相对的或绝对的)代替传统的机械凸轮。各轴都 |
| 支持凸轮运动。 |
|
| |
|
| 飞剪:允许从轴和主轴之间以一定的加减速方式进行位置同步――所有的连接通过软件来产生运动 |
| |
|
| 编程开发工具 |
|
| |
|
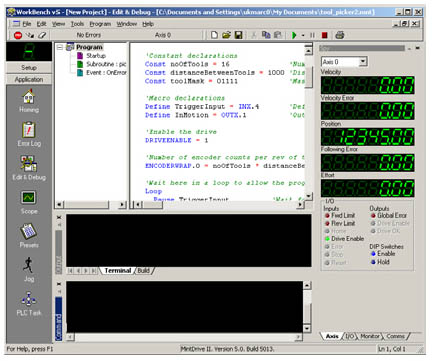
| Mint WorkBench软件平台提供了一种易于运用的Mint编程Windows开发前台,包括关键字的彩色高 |
|
亮提示和上下文提示帮助。编程导航使得无论多么复杂的程序编程都变得轻而易举。 |
| |
|
 |
| |
|
| 特定包括: |
|
|
●
直接命令交互,即使程序正在运行中 |
|
|
●
监测窗口,用于监测通用运动变量和I/O |
|
|
●
软件示波器 |
|
|
●
观察窗,用于变量监测 |
|
|
●
快速技术支持链接的SupportMe功能 |
|
|
●
网络更新 |
|
| |
|
| "C"编程 |
|
| |
|
|
为了优化性能,程序可以用嵌入式"C"来写。借助于Mint兼容的"C"语言程序库实现先进的实时控制 |
| 性能。 |
| |
|
|
开放式结构甚至允许将用户的运动方式和控制算法更进一步地嵌入到实时代码中。 |
| |
|
| Windows编程 |
|
| |
|
|
运用ActiveX控件,编程者可以从流行的Windows高级“快速应用开发”环境,如Visual Basic, |
| Visual C++,Delphi和LabVIEW等调用运动控制卡上的高级Mint语言功能。 |
| |
|

